
I was having a discussion about different approaches for quadratic spline interpolation and I introduced an example involving interpolation of points on a modulus function. This led to a deeper exploration of how altering the knot sequence of a B-Spline interpolation can substantially improve the results. I want to record this here.
The question that initially arose was about what methods were available for quadratic spline interpolation that were better than the usual introductory textbook approach of positioning the knots of the piecewise polynomial at the data points and forcing the first derivatives to be continuous at the joins. B-Splines allow the task to be achieved more flexibly, e.g., their localization at `difficult bits’ can be made substantially better sometimes by adjusting the knot sequence or by choosing collocation points according to certain criteria. I thought it might be interesting to illustrate the situation by experimenting with a ‘pathological’ function for quadratic spline interpolation, namely one that does not have continuous first derivatives at one or more of the knots when seeking to apply the introductory textbook approach (this can be expected to cause problems for the introductory textbook approach since it works by enforcing continuous first derivatives at the knots). I therefore used points on a modulus function (including a data point at the origin), and tried performing a quadratic spline interpolation using both the introductory textbook approach and an in-built scipy.interpolate.BSpline() method. I got the following results:
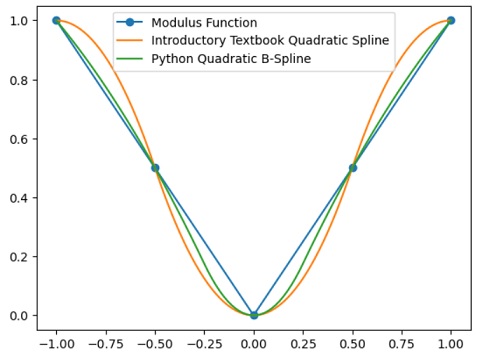
The picture shows the modulus function I used, with five data points one of which is at the origin (where there is a discontinuity in the first derivative). The orange curve is the result of the introductory textbook quadratic spline interpolation procedure, which does indeed perform quite badly with this pathological case. The green curve performs better and is the result of the in-built Python quadratic B-Spline method.
In producing the above picture, a default setting was used for the scipy.interpolate.BSpline() method and the question then arose as to whether the interpolation could be improved by adjusting the underlying B-Spline knot sequence. To experiment with this, I decided to replicate the in-built method using Python code which reveals more of the mathematical structure underlying B-Splines, and then to explore the effects of different knot settings.
B-Splines are a numerically convenient set of piecewise polynomial (pp) functions used as a basis for all other pp splines. Using standard notational conventions, a pp function 














In general, it is necessary to impose continuity conditions on pp functions and their derivatives, of the form

for 











B-Splines originally emerged from the desire to have a numerically convenient basis for 






This relation can be used to generate B-Splines by induction, starting from 

Note that the B-Spline 




A result known as the Curry-Schoenberg Theorem shows that the B-Splines as defined above constitute a basis for 
(i)
(ii) 

(iii) 

(iv) for 
(v) 

These specifications provide the necessary information for generating a knot sequence 
Using this structure, I managed to replicate what the in-built scipy.interpolate.BSpline() method did above by using a breakpoint sequence

which is of length 



The order is 




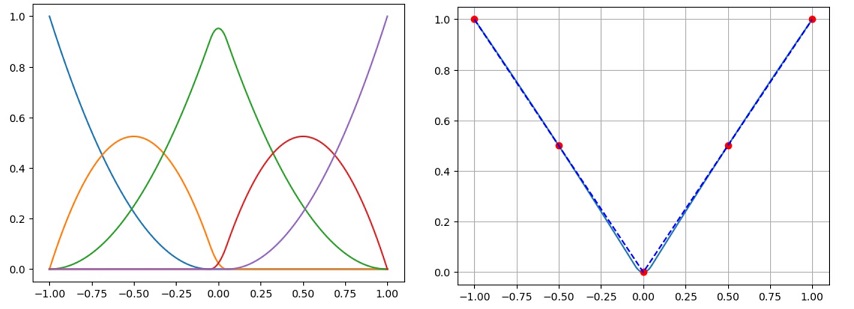
However, this is not the best we can do. The result can be improved substantially simply by adjusting the knot sequence a little. For example, an obvious adjustment would be to put the two interior knots much closer to the origin. I tried this with a new knot sequence

We still have five B-Splines in the basis set, but, as can be seen in the picture on the left below, the middle B-SPline has now become more `peaked’. The resulting interpolation shown on the right-hand side of the picture is now much better than the one produced by default using the scipy.interpolate.BSpline() method above:
So, this is a worked example of B-Splines allowing more flexibility to ‘fiddle with the settings’ in order to achieve a better quadratic spline interpolation.
