
In the present post I want to record some notes I made on the mathematical nuances involved in a proof of Noether’s theorem and the mathematical relevance of the theorem to some simple conservation laws in classical physics, namely, the conservation of energy and the conservation of linear momentum. Noether’s Theorem has important applications in a wide range of classical mechanics problems as well as in quantum mechanics and Einstein’s relativity theory. It is also used in the study of certain classes of partial differential equations that can be derived from variational principles.
The theorem was first published by Emmy Noether in 1918. An interesting book by Yvette Kosmann-Schwarzbach presents an English translation of Noether’s 1918 paper and discusses in detail the history of the theorem’s development and its impact on theoretical physics in the 20th Century. (Kosmann-Schwarzbach, Y, 2011, The Noether Theorems: Invariance and Conservation Laws in the Twentieth Century. Translated by Bertram Schwarzbach. Springer). At the time of writing, the book is freely downloadable online.
Mathematical setup of Noether’s theorem
The case I explore in detail here is that of a variational calculus functional of the form
![S[y] = \int_a^b \mathrm{d}x F(x, y, y^{\prime})](https://s0.wp.com/latex.php?latex=S%5By%5D+%3D+%5Cint_a%5Eb+%5Cmathrm%7Bd%7Dx+F%28x%2C+y%2C+y%5E%7B%5Cprime%7D%29&bg=ffffff&fg=111111&s=0&c=20201002)
where 





for 





for
Noether’s theorem is assumed to apply to infinitesimally small changes in the dependent and independent variables, so we can assume 





where

and


where

Noether’s theorem then says that whenever the functional ![S[y]](https://s0.wp.com/latex.php?latex=S%5By%5D&bg=ffffff&fg=111111&s=0&c=20201002)

for all 





As illustrated below, this remarkable equation encodes a number of conservation laws in physics, including conservation of energy, linear and angular momentum given that the relevant equations of motion are invariant under translations in time and space, and under rotations in space respectively. Thus, Noether’s theorem is often expressed as a statement along the lines that whenever a system has a continuous symmetry there must be corresponding quantities whose values are conserved.
Application of the theorem to familiar conservation laws in classical physics
It is, of course, not necessary to use the full machinery of Noether’s theorem for simple examples of conservation laws in classical physics. The theorem is most useful in unfamiliar situations in which it can reveal conserved quantities which were not previously known. However, going through the motions in simple cases clarifies how the mathematical machinery works in more sophisticated and less familiar situations.
To obtain the law of the conservation of energy in the simplest possible scenario, consider a particle of mass 




The Euler-Lagrange equation for this functional would give Newton’s second law as the equation governing the particle’s motion. With regard to demonstrating energy conservation, we notice that the Lagrangian, which is more generally of the form 


and

From the first equation we see that 


where the limits in the second integral follow from the change of the time variable from 

Evaluating the terms on the left-hand side we get


which is of course the statement of the conservation of energy.
To obtain the law of conservation of linear momentum in the simplest possible scenario, assume now that the above particle is moving freely in the absence of any potential field, so 

The Euler-Lagrange equation for this functional would give Newton’s first law as the equation governing the particle’s motion (constant velocity in the absence of any forces). To get the law of conservation of linear momentum we will consider a translation in space rather than time, and check that the action functional is invariant under such translations. In the context of the mathematical setup of Noether’s theorem above, we can write the relevant transformations as

and

From the first equation we see that 



since the limits of integration are not affected by the translation in space. Thus, Noether’s theorem holds and with


This is, of course, the statement of the conservation of linear momentum.
Proof of Noether’s theorem
To prove Noether’s theorem we will begin with the transformed functional

We will substitute into this the linearised forms of the transformations, namely
and
for

and

Using the linearised forms of the transformations and writing 


Inverting the second equation we get

Using this in the first equation we find, to first order in

Making the necessary substitutions we can then write the transformed functional as


Treating 


Then using the expression for 






Ignoring the second order term in

Since the functional is invariant, however, this implies

We now manipulate this equation by integrating the terms involving 

![\int_c^d \mathrm{d}x \big(F - \sum_{k=1}^n \frac{\partial F}{\partial y^{\prime}_k} \frac{\mathrm{d}y_k}{\mathrm{d}x}\big)\frac{\mathrm{d}\phi}{\mathrm{d}x} = \bigg[\phi \big(F - \sum_{k=1}^n \frac{\partial F}{\partial y^{\prime}_k} \frac{\mathrm{d}y_k}{\mathrm{d}x}\big)\bigg]_c^d](https://s0.wp.com/latex.php?latex=%5Cint_c%5Ed+%5Cmathrm%7Bd%7Dx+%5Cbig%28F+-+%5Csum_%7Bk%3D1%7D%5En+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+y%5E%7B%5Cprime%7D_k%7D+%5Cfrac%7B%5Cmathrm%7Bd%7Dy_k%7D%7B%5Cmathrm%7Bd%7Dx%7D%5Cbig%29%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cphi%7D%7B%5Cmathrm%7Bd%7Dx%7D+%3D+%5Cbigg%5B%5Cphi+%5Cbig%28F+-+%5Csum_%7Bk%3D1%7D%5En+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+y%5E%7B%5Cprime%7D_k%7D+%5Cfrac%7B%5Cmathrm%7Bd%7Dy_k%7D%7B%5Cmathrm%7Bd%7Dx%7D%5Cbig%29%5Cbigg%5D_c%5Ed&bg=ffffff&fg=111111&s=0&c=20201002)

and
![\int_c^d \mathrm{d}x \sum_{k=1}^n \frac{\partial F}{\partial y^{\prime}_k}\frac{\mathrm{d}\psi_k}{\mathrm{d}x} = \bigg[\sum_{k=1}^n \frac{\partial F}{\partial y^{\prime}_k}\psi_k\bigg]_c^d - \int_c^d \mathrm{d}x \sum_{k=1}^n \frac{\mathrm{d}}{\mathrm{d}x}\big(\frac{\partial F}{\partial y^{\prime}_k}\big)\psi_k](https://s0.wp.com/latex.php?latex=%5Cint_c%5Ed+%5Cmathrm%7Bd%7Dx+%5Csum_%7Bk%3D1%7D%5En+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+y%5E%7B%5Cprime%7D_k%7D%5Cfrac%7B%5Cmathrm%7Bd%7D%5Cpsi_k%7D%7B%5Cmathrm%7Bd%7Dx%7D+%3D+%5Cbigg%5B%5Csum_%7Bk%3D1%7D%5En+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+y%5E%7B%5Cprime%7D_k%7D%5Cpsi_k%5Cbigg%5D_c%5Ed+-+%5Cint_c%5Ed+%5Cmathrm%7Bd%7Dx+%5Csum_%7Bk%3D1%7D%5En+%5Cfrac%7B%5Cmathrm%7Bd%7D%7D%7B%5Cmathrm%7Bd%7Dx%7D%5Cbig%28%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+y%5E%7B%5Cprime%7D_k%7D%5Cbig%29%5Cpsi_k&bg=ffffff&fg=111111&s=0&c=20201002)
Substituting these into the equation gives
![\bigg[\phi \big(F - \sum_{k=1}^n \frac{\partial F}{\partial y^{\prime}_k} \frac{\mathrm{d}y_k}{\mathrm{d}x}\big) + \sum_{k=1}^n \frac{\partial F}{\partial y^{\prime}_k}\psi_k\bigg]_c^d](https://s0.wp.com/latex.php?latex=%5Cbigg%5B%5Cphi+%5Cbig%28F+-+%5Csum_%7Bk%3D1%7D%5En+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+y%5E%7B%5Cprime%7D_k%7D+%5Cfrac%7B%5Cmathrm%7Bd%7Dy_k%7D%7B%5Cmathrm%7Bd%7Dx%7D%5Cbig%29+%2B+%5Csum_%7Bk%3D1%7D%5En+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+y%5E%7B%5Cprime%7D_k%7D%5Cpsi_k%5Cbigg%5D_c%5Ed&bg=ffffff&fg=111111&s=0&c=20201002)


We can manipulate this equation further by expanding the integrand in the second term on the left-hand side. We get



Thus, the equation becomes

We can now see at a glance that the second and third terms on the left-hand side must vanish because of the Euler-Lagrange expressions appearing in the brackets (which are identically zero on stationary paths). Thus we arrive at the equation
![\bigg[\phi \big(F - \sum_{k=1}^n \frac{\partial F}{\partial y^{\prime}_k} \frac{\mathrm{d}y_k}{\mathrm{d}x}\big) + \sum_{k=1}^n \frac{\partial F}{\partial y^{\prime}_k}\psi_k\bigg]_c^d = 0](https://s0.wp.com/latex.php?latex=%5Cbigg%5B%5Cphi+%5Cbig%28F+-+%5Csum_%7Bk%3D1%7D%5En+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+y%5E%7B%5Cprime%7D_k%7D+%5Cfrac%7B%5Cmathrm%7Bd%7Dy_k%7D%7B%5Cmathrm%7Bd%7Dx%7D%5Cbig%29+%2B+%5Csum_%7Bk%3D1%7D%5En+%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+y%5E%7B%5Cprime%7D_k%7D%5Cpsi_k%5Cbigg%5D_c%5Ed+%3D+0&bg=ffffff&fg=111111&s=0&c=20201002)
which proves that the formula inside the square brackets is constant as per Noether’s theorem.
 to be the time-integral of a Lagrangian
to be the time-integral of a Lagrangian  :
:
 says that the Lagrangian is a function of position coordinates
says that the Lagrangian is a function of position coordinates  and velocities
and velocities  (and
(and  ranges over however many coordinates there are). We find the trajectory that yields a desired extremal value of the action
ranges over however many coordinates there are). We find the trajectory that yields a desired extremal value of the action 
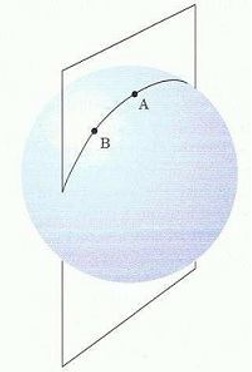
 and
and  , and we are considering possible paths between them to try to find the extremal one. We can describe any path between
, and we are considering possible paths between them to try to find the extremal one. We can describe any path between  that goes from a value of
that goes from a value of  at
at  at
at  . Noting that the line element can be written as
. Noting that the line element can be written as

 . This situation is exactly analogous to the usual calculus of variations scenario because, writing
. This situation is exactly analogous to the usual calculus of variations scenario because, writing  , we see that we have a Lagrangian function
, we see that we have a Lagrangian function

 separate differential equations in an
separate differential equations in an  .
.

 . Also note that the metric is treated as a constant as it depends on
. Also note that the metric is treated as a constant as it depends on  not on
not on  . Doing the sums over the Kronecker deltas we get
. Doing the sums over the Kronecker deltas we get













 we get
we get
 in the first term to make it clearer that the Einstein summations in the first and second terms are independent. This is the first version of the geodesic equations, derived by requiring that the path between the points
in the first term to make it clearer that the Einstein summations in the first and second terms are independent. This is the first version of the geodesic equations, derived by requiring that the path between the points  and we take
and we take  to be an infinitesimal displacement along the path, then a tangent vector to the path is
to be an infinitesimal displacement along the path, then a tangent vector to the path is





 and
and  to get
to get
![\big[\frac{d^2 x^{\mu}}{ds^2} + \frac{d x^{\alpha}}{ds} \frac{d x^{\beta}}{ds} \Gamma^{\mu}_{\hphantom{\mu} \alpha \beta} \big] e_{\mu} = 0](https://s0.wp.com/latex.php?latex=%5Cbig%5B%5Cfrac%7Bd%5E2+x%5E%7B%5Cmu%7D%7D%7Bds%5E2%7D+%2B+%5Cfrac%7Bd+x%5E%7B%5Calpha%7D%7D%7Bds%7D+%5Cfrac%7Bd+x%5E%7B%5Cbeta%7D%7D%7Bds%7D+%5CGamma%5E%7B%5Cmu%7D_%7B%5Chphantom%7B%5Cmu%7D+%5Calpha+%5Cbeta%7D+%5Cbig%5D+e_%7B%5Cmu%7D+%3D+0&bg=ffffff&fg=111111&s=0&c=20201002)





 in the first term;
in the first term;  in the second term;
in the second term;  and
and  in the third term; and
in the third term; and 
![0 = \frac{dx^{\alpha}}{ds} \frac{dx^{\beta}}{ds} \frac{1}{2} [\partial_{\alpha} \ g_{\beta \sigma} + \partial_{\beta} \ g_{\sigma \alpha} - \partial_{\sigma} \ g_{\alpha \beta}] + g_{\sigma \mu} \frac{d^2 x^{\mu}}{ds^2}](https://s0.wp.com/latex.php?latex=0+%3D+%5Cfrac%7Bdx%5E%7B%5Calpha%7D%7D%7Bds%7D+%5Cfrac%7Bdx%5E%7B%5Cbeta%7D%7D%7Bds%7D+%5Cfrac%7B1%7D%7B2%7D+%5B%5Cpartial_%7B%5Calpha%7D+%5C+g_%7B%5Cbeta+%5Csigma%7D+%2B+%5Cpartial_%7B%5Cbeta%7D+%5C+g_%7B%5Csigma+%5Calpha%7D+-+%5Cpartial_%7B%5Csigma%7D+%5C+g_%7B%5Calpha+%5Cbeta%7D%5D+%2B+g_%7B%5Csigma+%5Cmu%7D+%5Cfrac%7Bd%5E2+x%5E%7B%5Cmu%7D%7D%7Bds%5E2%7D&bg=ffffff&fg=111111&s=0&c=20201002)
 and using the facts that
and using the facts that
![\Gamma^{\mu}_{\hphantom{\mu} \alpha \beta} = \frac{1}{2} g^{\mu \sigma} [\partial{\alpha} \ g_{\beta \sigma} + \partial_{\beta} \ g_{\sigma \alpha} - \partial_{\sigma} \ g_{\alpha \beta}]](https://s0.wp.com/latex.php?latex=%5CGamma%5E%7B%5Cmu%7D_%7B%5Chphantom%7B%5Cmu%7D+%5Calpha+%5Cbeta%7D+%3D+%5Cfrac%7B1%7D%7B2%7D+g%5E%7B%5Cmu+%5Csigma%7D+%5B%5Cpartial%7B%5Calpha%7D+%5C+g_%7B%5Cbeta+%5Csigma%7D+%2B+%5Cpartial_%7B%5Cbeta%7D+%5C+g_%7B%5Csigma+%5Calpha%7D+-+%5Cpartial_%7B%5Csigma%7D+%5C+g_%7B%5Calpha+%5Cbeta%7D%5D&bg=ffffff&fg=111111&s=0&c=20201002)


 will be taken to be
will be taken to be
 is the particle’s velocity,
is the particle’s velocity,  is its momentum, and
is its momentum, and  will be regarded as some function of
will be regarded as some function of ![S[x]= \int_{t_1}^{t_2} L(t, x, \dot{x}) dt = \int_{t_1}^{t_2} (K - U) dt](https://s0.wp.com/latex.php?latex=S%5Bx%5D%3D+%5Cint_%7Bt_1%7D%5E%7Bt_2%7D+L%28t%2C+x%2C+%5Cdot%7Bx%7D%29+dt%C2%A0%3D+%5Cint_%7Bt_1%7D%5E%7Bt_2%7D+%28K+-+U%29+dt&bg=ffffff&fg=111111&s=0&c=20201002)
 is usually termed the Lagrangian in classical mechanics. The functional
is usually termed the Lagrangian in classical mechanics. The functional ![S[x]](https://s0.wp.com/latex.php?latex=S%5Bx%5D&bg=ffffff&fg=111111&s=0&c=20201002) is usually called the action. The Euler-Lagrange equation for this Calculus of Variations problem is
is usually called the action. The Euler-Lagrange equation for this Calculus of Variations problem is



 .
.
 is again the momentum of the particle and
is again the momentum of the particle and  is the reduced Planck’s constant from quantum mechanics. (Note that
is the reduced Planck’s constant from quantum mechanics. (Note that  has units of
has units of  so we need to remove these by dividing by
so we need to remove these by dividing by  in quantum mechanics is dimensionless). We then have
in quantum mechanics is dimensionless). We then have





![T[\psi] = \int_{-\infty}^{\infty} M(x, \psi, \psi^{\prime}) \mathrm{d}x = \int_{-\infty}^{\infty} \big(\frac{\hbar^2}{2m} (\psi^{\prime})^2 + (U - E) \psi^2\big)\mathrm{d}x](https://s0.wp.com/latex.php?latex=T%5B%5Cpsi%5D+%3D+%5Cint_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D+M%28x%2C+%5Cpsi%2C+%5Cpsi%5E%7B%5Cprime%7D%29+%5Cmathrm%7Bd%7Dx+%3D+%5Cint_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D%C2%A0+%5Cbig%28%5Cfrac%7B%5Chbar%5E2%7D%7B2m%7D+%28%5Cpsi%5E%7B%5Cprime%7D%29%5E2+%2B+%28U+-+E%29+%5Cpsi%5E2%5Cbig%29%5Cmathrm%7Bd%7Dx&bg=ffffff&fg=111111&s=0&c=20201002)






 in a potential
in a potential  on the line
on the line  .
. and velocity
and velocity  (with respect to some specified origin) has a linear momentum vector
(with respect to some specified origin) has a linear momentum vector  and angular momentum vector
and angular momentum vector
 is the vector product operation. The magnitude of the angular momentum vector is
is the vector product operation. The magnitude of the angular momentum vector is  where
where  is the angle between
is the angle between  is given by the right-hand rule when the vectors
is given by the right-hand rule when the vectors 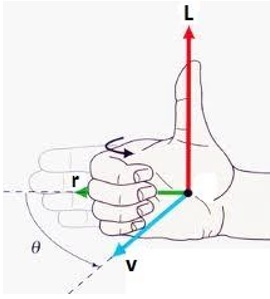
 and
and  directions in Cartesian coordinates using
directions in Cartesian coordinates using





 appearing in
appearing in 
 direction using an integral involving momentum as a function of
direction using an integral involving momentum as a function of  where
where
 ,
,  and
and  by
by


 ,
,  and
and  in quantum mechanical operator form in Cartesian coordinates as
in quantum mechanical operator form in Cartesian coordinates as



 , but in spherical polar coordinates rather than Cartesian coordinates, where
, but in spherical polar coordinates rather than Cartesian coordinates, where



 we get
we get

















![= \big[ i \hbar \big(\cot \theta \cos \phi \frac{\partial}{\partial \phi} + \sin \phi \frac{\partial}{\partial \theta} \big) \big]^2 + \big[ - i \hbar \big(\cos \phi \frac{\partial}{\partial \theta} - \cot \theta \sin \phi \frac{\partial}{\partial \phi} \big) \big]^2 + \big[ - i \hbar \frac{\partial}{\partial \phi} \big]^2](https://s0.wp.com/latex.php?latex=%3D+%5Cbig%5B+i+%5Chbar+%5Cbig%28%5Ccot+%5Ctheta+%5Ccos+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cphi%7D+%2B+%5Csin+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Ctheta%7D+%5Cbig%29+%5Cbig%5D%5E2+%2B+%5Cbig%5B+-+i+%5Chbar+%5Cbig%28%5Ccos+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Ctheta%7D+-+%5Ccot+%5Ctheta+%5Csin+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cphi%7D+%5Cbig%29+%5Cbig%5D%5E2+%2B+%5Cbig%5B+-+i+%5Chbar+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cphi%7D+%5Cbig%5D%5E2&bg=ffffff&fg=111111&s=0&c=20201002)
![= - \hbar^2 \big[ \sin^2 \phi \frac{\partial^2}{\partial \theta^2} + \big(\sin \phi \frac{\partial}{\partial \theta} \big) \big(\cot \theta \cos \phi \frac{\partial}{\partial \phi} \big) + \big(\cot \theta \cos \phi \frac{\partial}{\partial \phi} \big)\big(\sin \phi \frac{\partial}{\partial \theta} \big) + \cot^2 \theta \cos^2 \phi \frac{\partial^2}{\partial \phi^2} \big]](https://s0.wp.com/latex.php?latex=%3D+-+%5Chbar%5E2+%5Cbig%5B+%5Csin%5E2+%5Cphi+%5Cfrac%7B%5Cpartial%5E2%7D%7B%5Cpartial+%5Ctheta%5E2%7D+%2B+%5Cbig%28%5Csin+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Ctheta%7D+%5Cbig%29+%5Cbig%28%5Ccot+%5Ctheta+%5Ccos+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cphi%7D+%5Cbig%29+%2B+%5Cbig%28%5Ccot+%5Ctheta+%5Ccos+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cphi%7D+%5Cbig%29%5Cbig%28%5Csin+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Ctheta%7D+%5Cbig%29+%2B+%5Ccot%5E2+%5Ctheta+%5Ccos%5E2+%5Cphi+%5Cfrac%7B%5Cpartial%5E2%7D%7B%5Cpartial+%5Cphi%5E2%7D+%5Cbig%5D&bg=ffffff&fg=111111&s=0&c=20201002)
![- \hbar^2 \big[ \cos^2 \phi \frac{\partial^2}{\partial \theta^2} - \big(\cos \phi \frac{\partial}{\partial \theta} \big) \big(\cot \theta \sin \phi \frac{\partial}{\partial \phi} \big) - \big(\cot \theta \sin \phi \frac{\partial}{\partial \phi} \big)\big(\cos \phi \frac{\partial}{\partial \theta} \big) + \cot^2 \theta \sin^2 \phi \frac{\partial^2}{\partial \phi^2} \big]](https://s0.wp.com/latex.php?latex=-+%5Chbar%5E2+%5Cbig%5B+%5Ccos%5E2+%5Cphi+%5Cfrac%7B%5Cpartial%5E2%7D%7B%5Cpartial+%5Ctheta%5E2%7D+-+%5Cbig%28%5Ccos+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Ctheta%7D+%5Cbig%29+%5Cbig%28%5Ccot+%5Ctheta+%5Csin+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cphi%7D+%5Cbig%29+-+%5Cbig%28%5Ccot+%5Ctheta+%5Csin+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Cphi%7D+%5Cbig%29%5Cbig%28%5Ccos+%5Cphi+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+%5Ctheta%7D+%5Cbig%29+%2B+%5Ccot%5E2+%5Ctheta+%5Csin%5E2+%5Cphi+%5Cfrac%7B%5Cpartial%5E2%7D%7B%5Cpartial+%5Cphi%5E2%7D+%5Cbig%5D&bg=ffffff&fg=111111&s=0&c=20201002)






![\nabla^2 F = \frac{1}{h_1 h_2 h_3}\bigg[ \frac{\partial }{\partial x_1}\big( \frac{h_2 h_3}{h_1}\frac{\partial F}{\partial x_1} \big) + \frac{\partial }{\partial x_2}\big( \frac{h_1 h_3}{h_2}\frac{\partial F}{\partial x_2} \big) + \frac{\partial }{\partial x_3}\big( \frac{h_1 h_2}{h_3}\frac{\partial F}{\partial x_3} \big) \bigg]](https://s0.wp.com/latex.php?latex=%5Cnabla%5E2+F+%3D+%5Cfrac%7B1%7D%7Bh_1+h_2+h_3%7D%5Cbigg%5B+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+x_1%7D%5Cbig%28+%5Cfrac%7Bh_2+h_3%7D%7Bh_1%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+x_1%7D+%5Cbig%29+%2B+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+x_2%7D%5Cbig%28+%5Cfrac%7Bh_1+h_3%7D%7Bh_2%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+x_2%7D+%5Cbig%29+%2B+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+x_3%7D%5Cbig%28+%5Cfrac%7Bh_1+h_2%7D%7Bh_3%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+x_3%7D+%5Cbig%29+%5Cbigg%5D&bg=ffffff&fg=111111&s=0&c=20201002)
 ,
,  ,
,  will take the form
will take the form
 ,
,  and
and  are the scale factors appearing in the Laplacian formula. In the metric, these convert the coordinate differentials
are the scale factors appearing in the Laplacian formula. In the metric, these convert the coordinate differentials  into lengths
into lengths  .
. ,
,  ,
,  and
and  so the Euclidean metric and the Laplacian formula reduce to the familiar forms
so the Euclidean metric and the Laplacian formula reduce to the familiar forms


 ,
,  and
and  . Putting these into the Laplacian formula we immediately get
. Putting these into the Laplacian formula we immediately get![\nabla^2 F = \frac{1}{r^2 \sin \theta} \bigg[ \frac{\partial }{\partial r}\big( \frac{r^2 \sin \theta}{1}\frac{\partial F}{\partial r} \big) + \frac{\partial }{\partial \theta}\big( \frac{r \sin \theta}{r}\frac{\partial F}{\partial \theta} \big) + \frac{\partial }{\partial \phi}\big( \frac{r}{r \sin \theta}\frac{\partial F}{\partial \phi} \big) \bigg]](https://s0.wp.com/latex.php?latex=%5Cnabla%5E2+F+%3D+%5Cfrac%7B1%7D%7Br%5E2+%5Csin+%5Ctheta%7D+%5Cbigg%5B+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+r%7D%5Cbig%28+%5Cfrac%7Br%5E2+%5Csin+%5Ctheta%7D%7B1%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+r%7D+%5Cbig%29+%2B+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Ctheta%7D%5Cbig%28+%5Cfrac%7Br+%5Csin+%5Ctheta%7D%7Br%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Ctheta%7D+%5Cbig%29+%2B+%5Cfrac%7B%5Cpartial+%7D%7B%5Cpartial+%5Cphi%7D%5Cbig%28+%5Cfrac%7Br%7D%7Br+%5Csin+%5Ctheta%7D%5Cfrac%7B%5Cpartial+F%7D%7B%5Cpartial+%5Cphi%7D+%5Cbig%29+%5Cbigg%5D&bg=ffffff&fg=111111&s=0&c=20201002)



 which of course is equivalent to the set of equations
which of course is equivalent to the set of equations










 ,
,  and
and  , let
, let  ,
,  and
and  . Then we need to find
. Then we need to find  ,
,  and
and  . We can use the first, second and third equations respectively in the above matrix system to find these, with
. We can use the first, second and third equations respectively in the above matrix system to find these, with  ,
,  and
and  respectively. Thus,
respectively. Thus,



 ,
,  we get
we get









 so we need to work out the three matrix equations above and sum them. The result will be a sum involving the nine partials
so we need to work out the three matrix equations above and sum them. The result will be a sum involving the nine partials  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  and
and  . I found that the most convenient way to work out the sum was by working out the coefficients of each of these nine partials individually in turn. The result is
. I found that the most convenient way to work out the sum was by working out the coefficients of each of these nine partials individually in turn. The result is











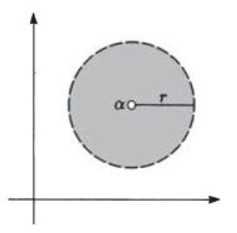
 has an isolated singularity at the point
has an isolated singularity at the point  , where
, where  , but not at
, but not at  has a derivative at
has a derivative at  but at no other point, as can easily be verified using the Cauchy-Riemann equations. Therefore this function is not analytic at
but at no other point, as can easily be verified using the Cauchy-Riemann equations. Therefore this function is not analytic at 
 is analytic (the function
is analytic (the function  is discontinuous everywhere on the negative real axis, so
is discontinuous everywhere on the negative real axis, so 
 . For example, if
. For example, if  we get
we get
 we get
we get
 at
at  we get
we get
 or indeed
or indeed  (which can be thought of as a punctured disc with infinite radius). In what follows I will use these three examples to delve into structural definitions of the three types of singularity. I will then explore their classification using Laurent series expansions.
(which can be thought of as a punctured disc with infinite radius). In what follows I will use these three examples to delve into structural definitions of the three types of singularity. I will then explore their classification using Laurent series expansions.
 which is analytic at
which is analytic at  for
for 

 exists since
exists since
 .
. is
is for
for 
 for
for 
 for
for  extends the analyticity of
extends the analyticity of  to include
to include 
 at
at  , such that
, such that for
for  as
as 

 ).
). for
for  , we see that
, we see that  behaves like
behaves like  near
near  as
as 

 , hence the name.
, hence the name.

 whereas
whereas



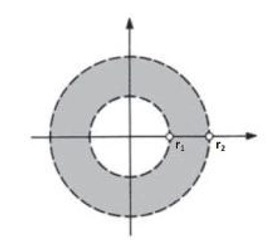


 , which converges at all points in the annulus. It is an `extended’ power series because it involves negative powers of
, which converges at all points in the annulus. It is an `extended’ power series because it involves negative powers of  . (The part of the power series involving negative powers is often referred to as the singular part. The part involving non-negative powers is referred to as the analytic part). This extended power series representation is the Laurent series about
. (The part of the power series involving negative powers is often referred to as the singular part. The part involving non-negative powers is referred to as the analytic part). This extended power series representation is the Laurent series about  for all
for all  ;
; and
and  ;
; for infinitely many
for infinitely many 

 and
and  , so the singularity in this case is a pole of order
, so the singularity in this case is a pole of order 
![\Delta \tau = \bigg[ \big(1 - \frac{k}{r}\big) (\Delta t)^2 - \frac{1}{c^2} \bigg\{\frac{(\Delta r)^2}{\big(1 - \frac{k}{r}\big)} + r^2(\Delta \theta)^2 + r^2 \sin^2 \theta (\Delta \phi)^2\bigg\} \bigg]^{1/2}](https://s0.wp.com/latex.php?latex=%5CDelta+%5Ctau+%3D+%5Cbigg%5B+%5Cbig%281+-+%5Cfrac%7Bk%7D%7Br%7D%5Cbig%29+%28%5CDelta+t%29%5E2+-+%5Cfrac%7B1%7D%7Bc%5E2%7D+%5Cbigg%5C%7B%5Cfrac%7B%28%5CDelta+r%29%5E2%7D%7B%5Cbig%281+-+%5Cfrac%7Bk%7D%7Br%7D%5Cbig%29%7D+%2B+r%5E2%28%5CDelta+%5Ctheta%29%5E2+%2B+r%5E2+%5Csin%5E2+%5Ctheta+%28%5CDelta+%5Cphi%29%5E2%5Cbigg%5C%7D+%5Cbigg%5D%5E%7B1%2F2%7D&bg=ffffff&fg=111111&s=0&c=20201002)
 and
and  ) the Schwarzschild metric simplifies to
) the Schwarzschild metric simplifies to
 term in the metric becomes infinite at
term in the metric becomes infinite at  so there is apparently a singularity here. However, this singularity is `removable’ by re-expressing the metric in a new set of coordinates,
so there is apparently a singularity here. However, this singularity is `removable’ by re-expressing the metric in a new set of coordinates,  , known as the Eddington-Finkelstein coordinates. The transformed metric has the form
, known as the Eddington-Finkelstein coordinates. The transformed metric has the form
 latitude in spherical coordinates, which disappears when a different coordinate system is used.
latitude in spherical coordinates, which disappears when a different coordinate system is used. in the Schwarzschild metric becomes infinite at
in the Schwarzschild metric becomes infinite at  , it appears that we also have a singularity at this point. This is not a removable singularity and can in fact be recognised in terms of the earlier discussion above as a pole of order 1 (also called a simple pole).
, it appears that we also have a singularity at this point. This is not a removable singularity and can in fact be recognised in terms of the earlier discussion above as a pole of order 1 (also called a simple pole). is discontinuous everywhere on the negative real axis. As I was working on alternative proofs, it became very clear to me how sensitive all the proofs were to the particular definition of the principal argument I was using, namely that the principal argument
is discontinuous everywhere on the negative real axis. As I was working on alternative proofs, it became very clear to me how sensitive all the proofs were to the particular definition of the principal argument I was using, namely that the principal argument  is the unique argument of
is the unique argument of  . In a sense, this definition manufactures the discontinuity of the complex square root function on the negative real axis, because the principal argument function itself is discontinuous here: the principal argument of a sequence of points approaching the negative real axis from above will tend to
. In a sense, this definition manufactures the discontinuity of the complex square root function on the negative real axis, because the principal argument function itself is discontinuous here: the principal argument of a sequence of points approaching the negative real axis from above will tend to  , whereas the principal argument of a sequence approaching the same point on the negative real axis from below will tend to
, whereas the principal argument of a sequence approaching the same point on the negative real axis from below will tend to  . I realised that all the proofs I was coming up with were exploiting this discontinuity of the principal argument function. However, this particular choice of principal argument function is completely arbitrary. An alternative could be to say that the principal argument of
. I realised that all the proofs I was coming up with were exploiting this discontinuity of the principal argument function. However, this particular choice of principal argument function is completely arbitrary. An alternative could be to say that the principal argument of  which we can call
which we can call  . The effect of this choice of principal argument function is to make the complex square root function discontinuous everywhere on the positive real axis! It turns out that we can choose an infinite number of different lines to be lines of discontinuity for the complex square root function, simply by choosing different definitions of the principal argument function. The same applies to the complex logarithm function. In this note I want to record some of my thoughts about this.
. The effect of this choice of principal argument function is to make the complex square root function discontinuous everywhere on the positive real axis! It turns out that we can choose an infinite number of different lines to be lines of discontinuity for the complex square root function, simply by choosing different definitions of the principal argument function. The same applies to the complex logarithm function. In this note I want to record some of my thoughts about this. where
where  then we define the principal branch of the logarithm function to be
then we define the principal branch of the logarithm function to be

 .
. and
and  in this way they will be single-valued, but the cost of doing this is that they will not be continuous on the whole of the complex plane (essentially because of the discontinuity of the principal argument function, which both functions `inherit’). They will be discontinuous everywhere on the negative real axis. The negative real axis is known as a branch cut for these functions. Using this terminology, what I want to explore in this short note is the fact that different choices of branch for these functions will result in different branch cuts for them.
in this way they will be single-valued, but the cost of doing this is that they will not be continuous on the whole of the complex plane (essentially because of the discontinuity of the principal argument function, which both functions `inherit’). They will be discontinuous everywhere on the negative real axis. The negative real axis is known as a branch cut for these functions. Using this terminology, what I want to explore in this short note is the fact that different choices of branch for these functions will result in different branch cuts for them.

 , we have
, we have  . However,
. However,



 , so the principal argument function is discontinuous at all points on the negative real axis.
, so the principal argument function is discontinuous at all points on the negative real axis. on the negative real axis depends crucially on the discontinuity of
on the negative real axis depends crucially on the discontinuity of  . We again consider the sequence of points
. We again consider the sequence of points





 . The effect of this is to change the branch cut of these functions to the positive real axis! The reason is that the principal argument function will now be discontinuous everywhere on the positive real axis, and this discontinuity will again be `inherited’ by the principal logarithm and square root functions.
. The effect of this is to change the branch cut of these functions to the positive real axis! The reason is that the principal argument function will now be discontinuous everywhere on the positive real axis, and this discontinuity will again be `inherited’ by the principal logarithm and square root functions. on the positive real axis we can consider the sequence of points
on the positive real axis we can consider the sequence of points

 . However,
. However,








 is any real number, we can define the principal argument function to be
is any real number, we can define the principal argument function to be  where
where
 modulo
modulo  .
.
 in which
in which  .
. discovered by Hamilton determine all possible products of
discovered by Hamilton determine all possible products of  and
and 






 and
and  one obtains
one obtains




 and
and  we get a different result:
we get a different result:






















 of a quaternion
of a quaternion


 of a quaternion we observe that
of a quaternion we observe that





 :
:










 is a unit quaternion (i.e.,
is a unit quaternion (i.e.,  ) we then get that
) we then get that
 the operation
the operation
 through an angle
through an angle  about the vector
about the vector  as the axis of rotation. The direction of rotation is given by the familiar right-hand rule, i.e., the thumb of the right hand points in the direction of the vector
as the axis of rotation. The direction of rotation is given by the familiar right-hand rule, i.e., the thumb of the right hand points in the direction of the vector  through
through  in the sense of the right-hand rule.
in the sense of the right-hand rule.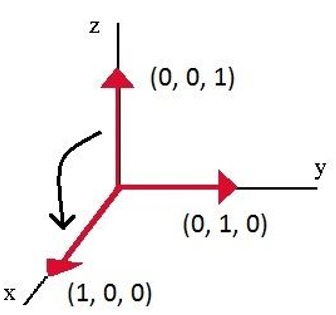
 . Using the quaternion rotation operator to achieve this, we would specify
. Using the quaternion rotation operator to achieve this, we would specify













 and applying this to the vector
and applying this to the vector  we get
we get

 :
:





 on the left hand side and the remainder in each equation is multiplied by
on the left hand side and the remainder in each equation is multiplied by  we conclude that the ternary representation of
we conclude that the ternary representation of  where the dot notation is used to indicate that the string of digits between the dots repeats indefinitely. This is completely analogous to the fact that the decimal, i.e., base-10, representation of
where the dot notation is used to indicate that the string of digits between the dots repeats indefinitely. This is completely analogous to the fact that the decimal, i.e., base-10, representation of  . Note that the cycle length is
. Note that the cycle length is  in the ternary representation of
in the ternary representation of  is the lowest power of the integer which is congruent to
is the lowest power of the integer which is congruent to  ).
). , for which the division algorithm yields
, for which the division algorithm yields


 . The cycle length for
. The cycle length for  .
. , the ternary cycle length will always be the order of
, the ternary cycle length will always be the order of  primes greater than
primes greater than 


 this formula can be rewritten as
this formula can be rewritten as
 distribution of the increments of a Wiener process
distribution of the increments of a Wiener process  , also commonly referred to as Brownian motion. This continuous-time stochastic process is symmetric about zero, continuous, and has stationary independent increments, i.e., the change from time
, also commonly referred to as Brownian motion. This continuous-time stochastic process is symmetric about zero, continuous, and has stationary independent increments, i.e., the change from time  to time
to time  , given by the random variable
, given by the random variable  , has the same
, has the same  to time
to time  , given by the random variable
, given by the random variable  , and the change is also independent of the history of the process before time
, and the change is also independent of the history of the process before time 

 we must also have
we must also have


 which is the same as the distribution of
which is the same as the distribution of  ).
).


 and
and  we see that
we see that
 where
where  and
and  are some parameters. Then the partial differential equation
are some parameters. Then the partial differential equation



 and
and  ). Now, in quantum mechanics a wave representation of a moving body is obtained as a wave-packet consisting of a superposition of individual plane waves of different wavelengths (or equivalently, different wave numbers
). Now, in quantum mechanics a wave representation of a moving body is obtained as a wave-packet consisting of a superposition of individual plane waves of different wavelengths (or equivalently, different wave numbers  ) in the form
) in the form
 is the Fourier transform of the
is the Fourier transform of the  at
at  , i.e.,
, i.e.,
 , always becomes Gaussian (irrespective of the original shape of the wave-packet) and has the form of the probability density function above, i.e.,
, always becomes Gaussian (irrespective of the original shape of the wave-packet) and has the form of the probability density function above, i.e.,
 replaced by
replaced by  and
and
 in the above set-up).
in the above set-up).